This robot offers a walking speed of up to 1.5 m/s (3.36 mph) with a potential movement capacity of 0.5 m/s, an overall weight of approximately 73 kg (160 lbs), advanced perception sensors including 3D LiDAR and depth cameras, maximum joint torque of 360 Nm, and single-arm freedom with 7 degrees of motion.
Free shipping. Fast Delivery. 2-Day UPS Shipping.
Specifications
| Key Dimensions | 1805 mm × 570 mm × 220 mm |
|---|---|
| Height | Approx. 180 cm |
| Thigh and Calf Length | 400 mm × 2 |
| Total Arm Length | 685 mm |
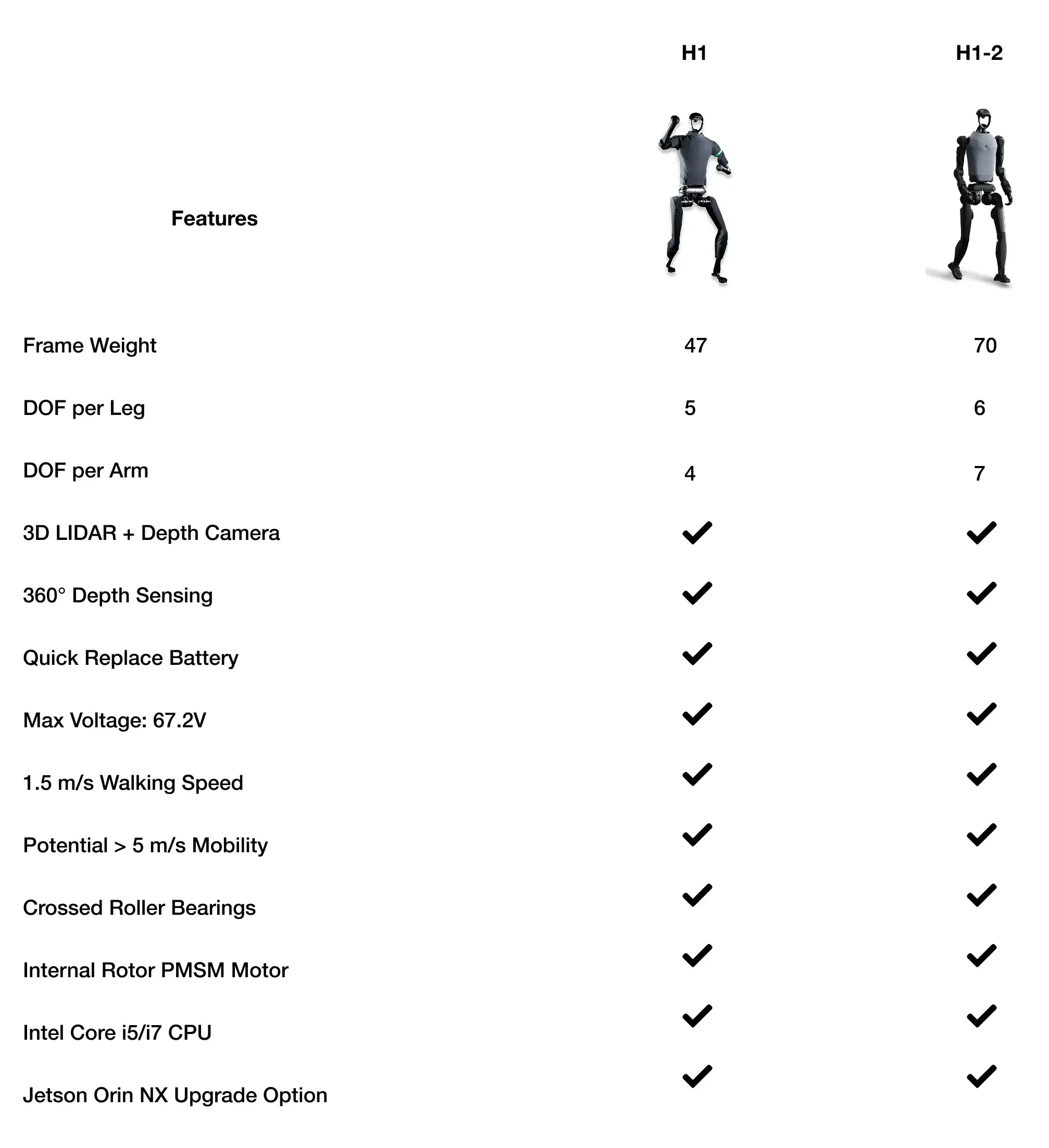
| DOF of Each Leg | 6 (Hip ×3, Knee ×1, Ankle ×2) |
| DOF of Each Arm | 7 (Shoulder ×3, Elbow ×1, Wrist ×3) |
| Total Weight | About 73 kg |
| Mobility | Walking speed: 1.5 m/s; Potential mobility: > 5 m/s |
| Joint Output Bearing | Industrial-grade crossed roller bearings (high precision, high load capacity) |
| Core Joint Motor | Low inertia high-speed internal rotor PMSM |
| Battery | 15Ah (0.864 kWh), Max Voltage 67.2V, quick-swap supported |
| Control & Perception Computing | Intel Core i5 (Platform), Intel Core i7 (User Development), optional Jetson Orin NX |
| Sensor Configuration | 3D LIDAR + Depth Camera (360° environmental perception) |
| Dexterous Hand | Optional RH56 or other ambidextrous hands |
| Arm Joint Performance | Shoulder: ~120 N·m, Elbow: ~120 N·m, Wrist: ~30 N·m |
| Normal Load Capacity | Peak: ~21 kg, Rated: ~7 kg (estimates) |
| Max Joint Torque (Selected) | Knee: 360 N·m, Hip: 220 N·m, Ankle: 59 N·m, Arm: 75 N·m |
| Peak Torque Density | 189 N·m/kg |
*Voice function includes offline voice interaction, commands, intercom and music play.
Features
Full-Sized Humanoid Capable of Running While Maintaining Stability
Walking speeds up to 1.5 m/s (3.36 mph).
Low Cost & Mass Production Capabilities
Built with self-developed core components such as high torque & 3D LiDAR, allowing for low-cost & mass production capabilities.
Enhanced Perception & Environment Mapping
The 3D LiDAR & depth camera is useful in perceiving localization & path planning.
Ultra Lightweight Design
Weighs approximately 47 kg (104 lbs) with a maximum torque of 360 Nm.
